Tech Articles How to Run Notepad++ On Mac Using an Emulator or A Virtual Machine Hi there, and welcome to the text editing universe! Although Notepad++ is an excellent text editor, it is primarily intended…
Gadgets How To Fix Apple Watch Not Charging? In the world of wearable technology, the Apple Watch has become choise of many. Its unique design, impressive features, and…
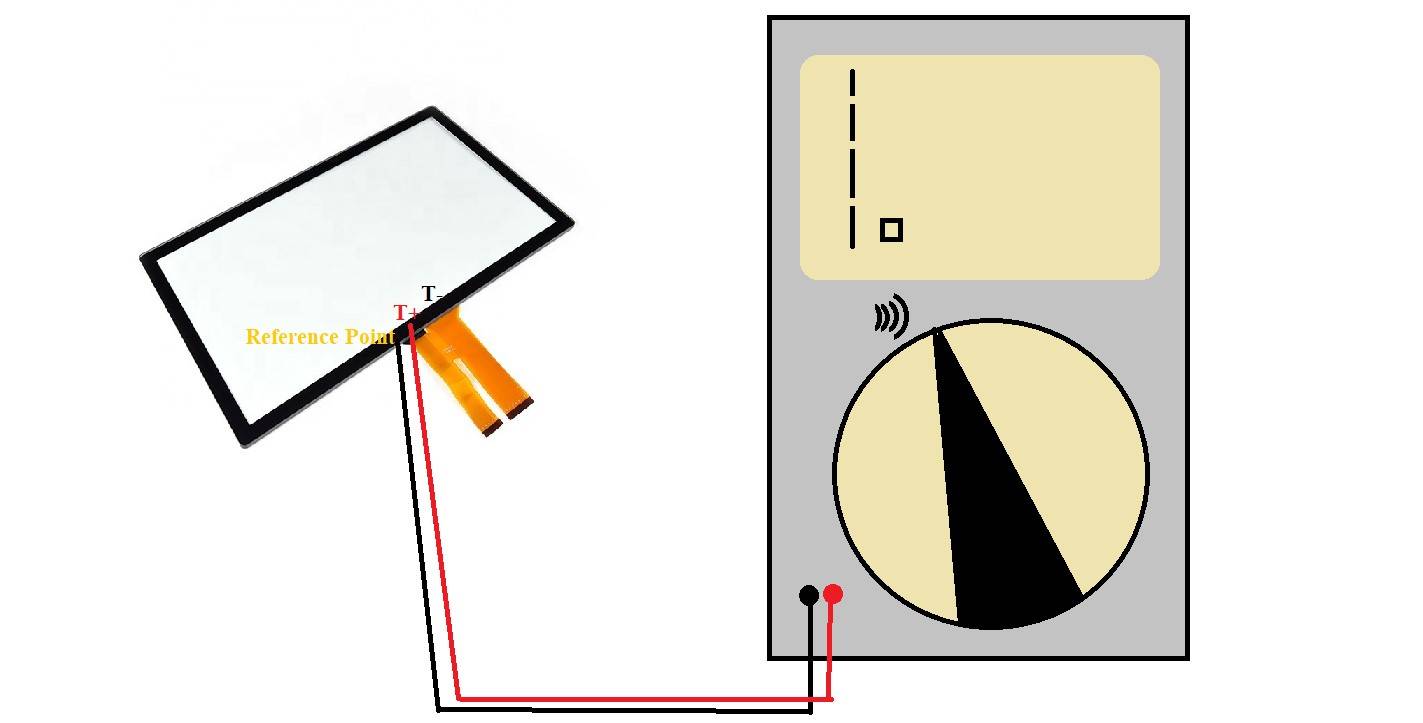
Engineering Projects How to test capacitive touch screen with DMM Do you want to know how to test capacitive touch screen with DMM? Are you looking to check the capacitive…
Python Top 10 AI Frameworks and Development tools in 2023 With the boom in AI. The demand of AI Frameworks have been increased. From robots to even your smart phones…
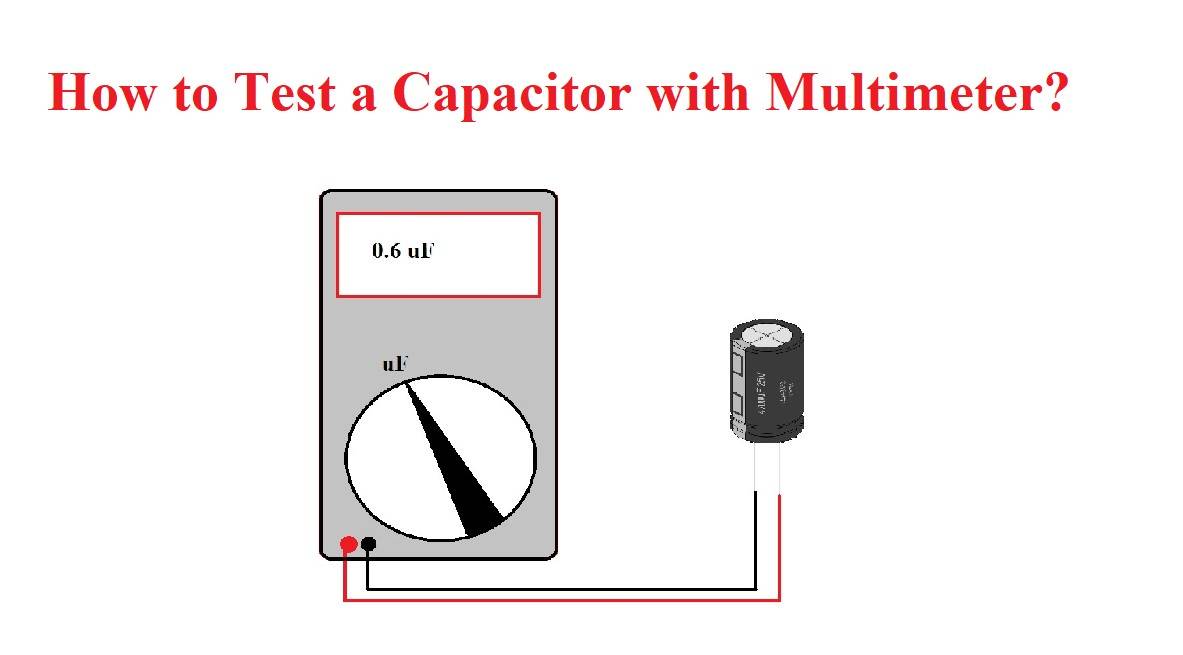
Multimeter How to test a capacitor with Multimeter Do you want to test a capacitor with Multimeter?. You can do it. It doesn’t matter whether you are a…
Python 10 Best Python Web Development Frameworks in 2023 Are you a web developer?? Do you want to know about best python web development frameworks for 2022. You are…
Python Top 5 Python Frameworks for Desktop Applications Are you an App developer?? Do you want to know about top 5 Python Frameworks for Desktop Applications. You are…
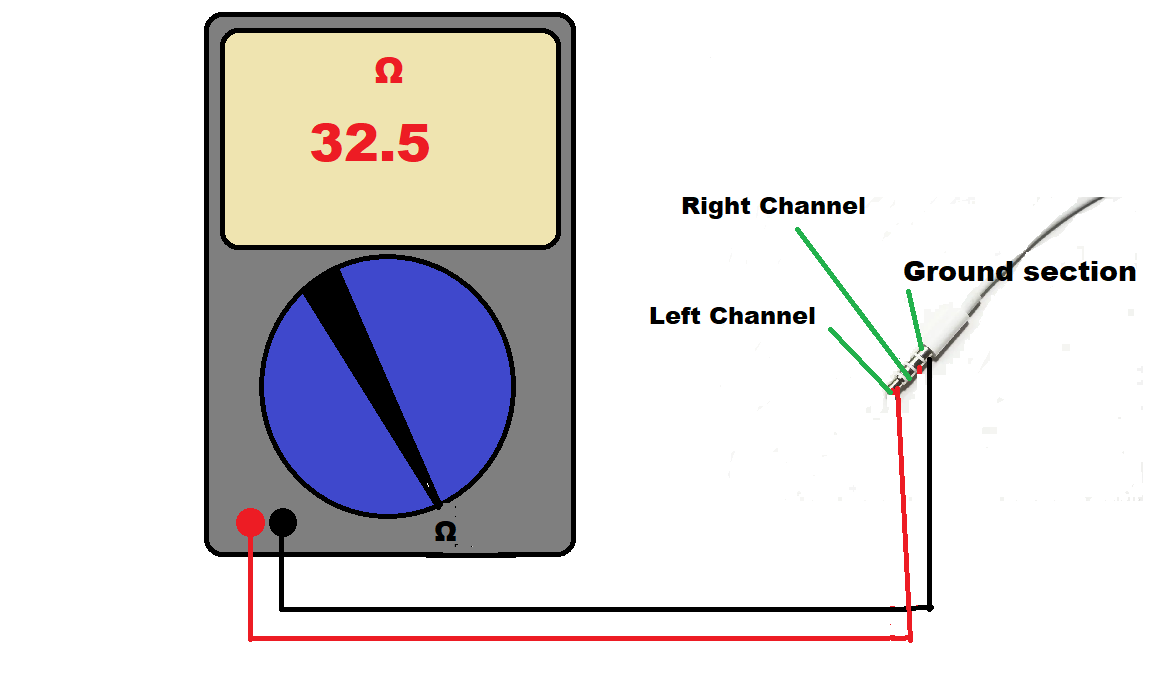
Multimeter How To Test Headphone Jack With Multimeter? Headphones make your life easy because they make your hands free while taking calls or listening to music. So your…
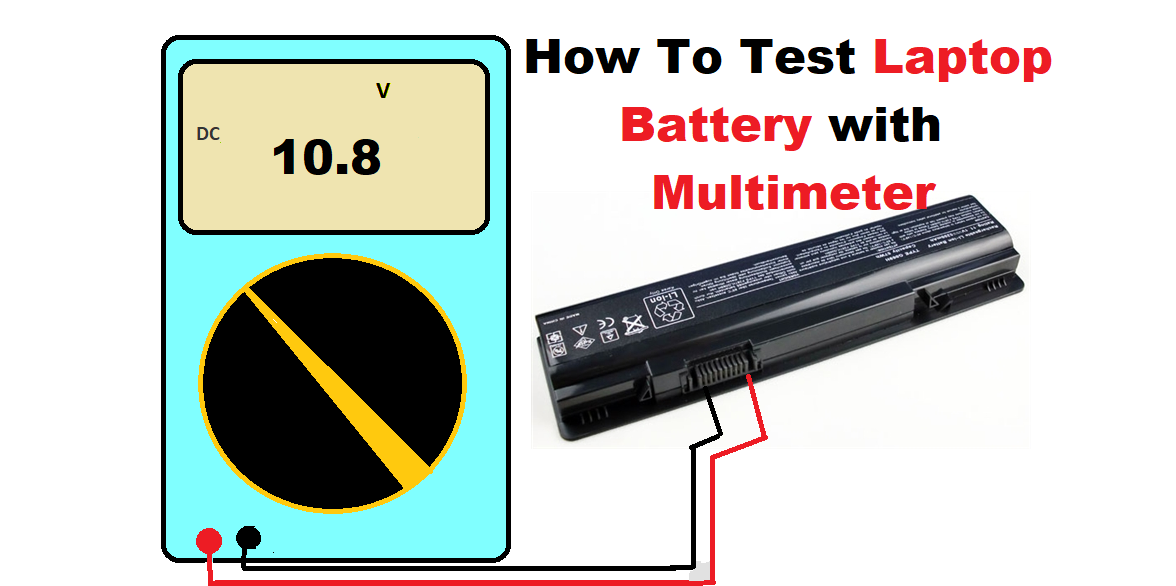
Multimeter How to Test Laptop Battery With Multimeter? How to Test Laptop Battery with Multimeter? Most laptops users don’t have an idea how sensitive a laptop battery is….
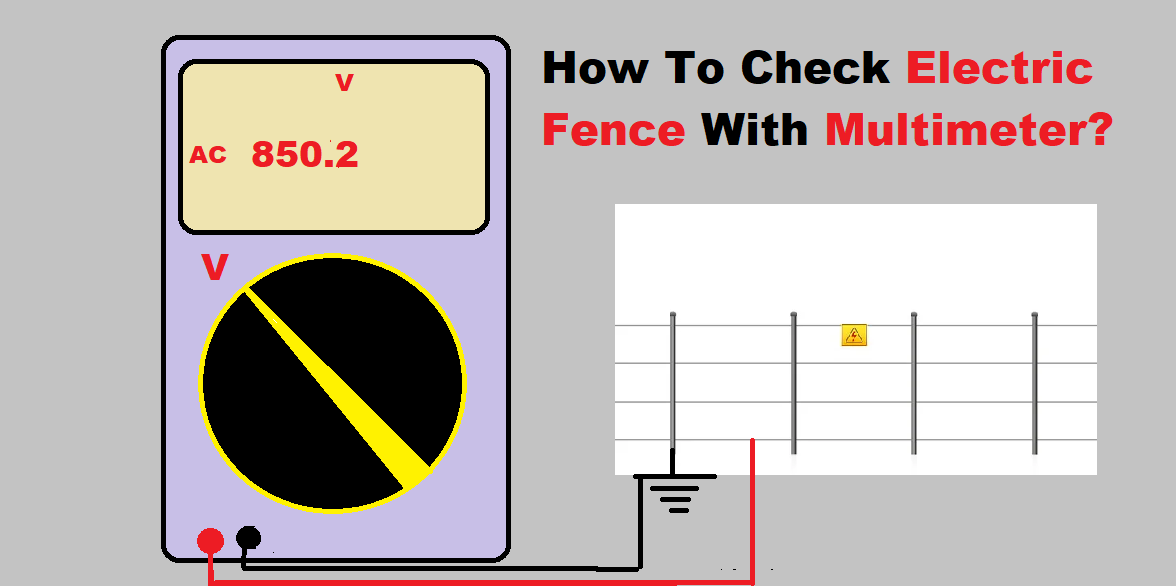
Multimeter How To Test Electric Fence With Multimeter? Are you using an Electric fence for the safety of your property, home, and animals?. This guide will help you…
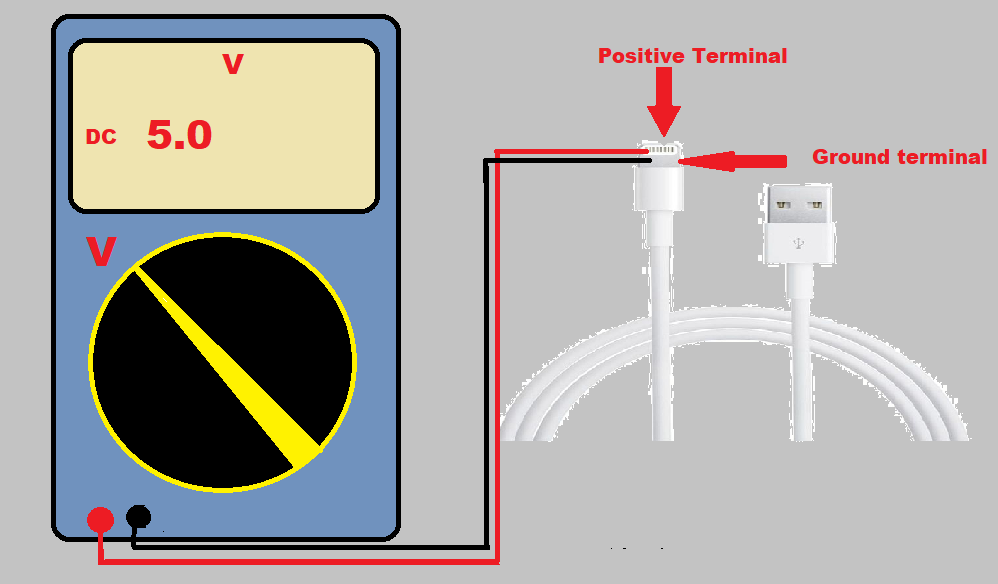
Multimeter How to test lightning cable with multimeter? Lightning cables are connector cables that are used on Apple devices. If you are facing trouble in charging or syncing…
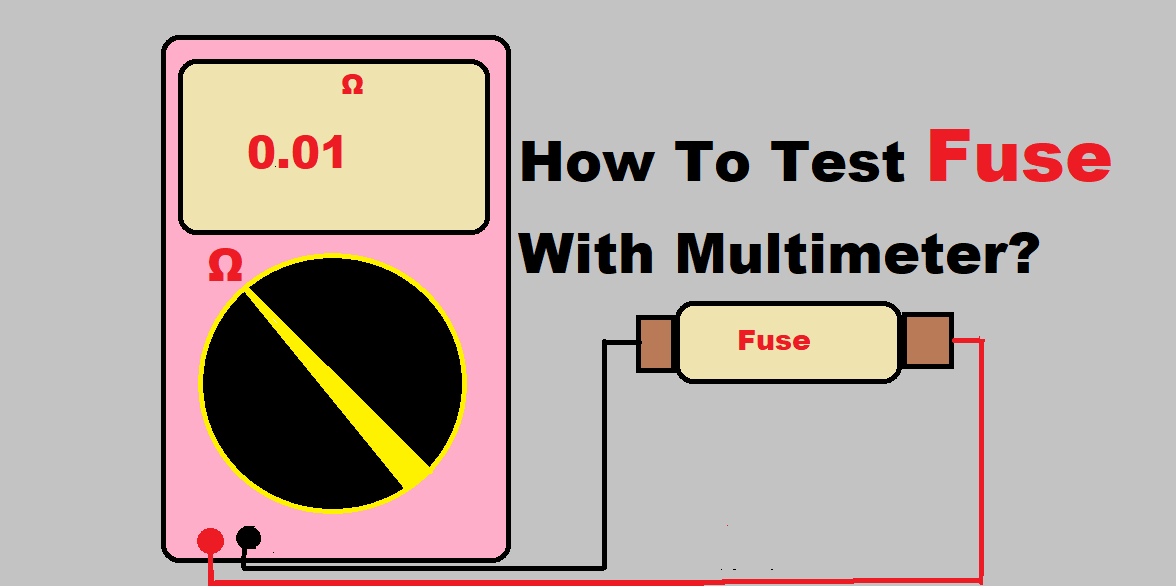
Multimeter How to test a Fuse with a Multimeter? Your Fuse is creating trouble for you and you don’t know how to test it? No problem this article on…
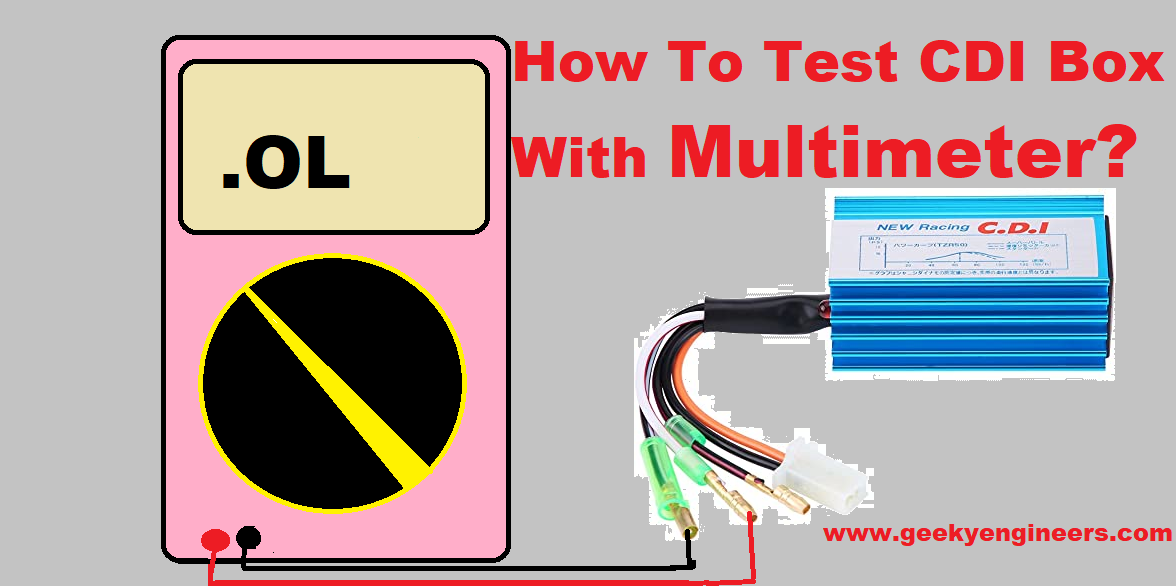
Multimeter How to test CDI Box with Multimeter? When troubleshooting the Capacitor discharge ignition box. This article will guide you in detail on How to test CDI Box with…
Tech Articles Fix: [SPICE] transient GMIN stepping at time=0.00156965 “[SPICE] transient GMIN stepping at time=0.00156965” you might have faced this error while performing simulation in Proteus. But You don’t need…
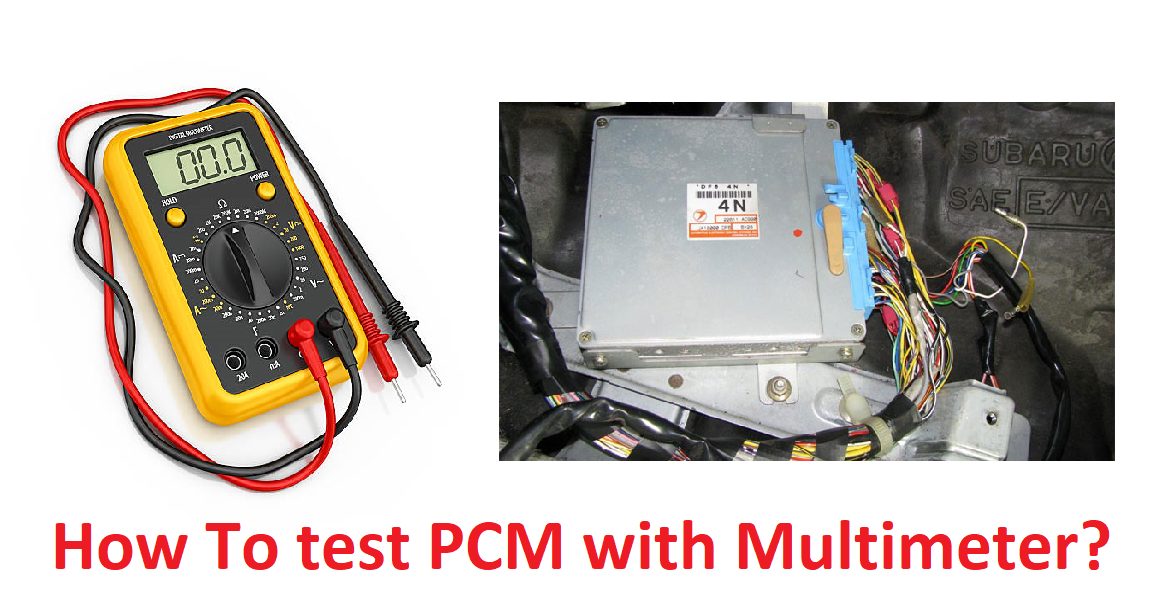
Multimeter How to test PCM with a Multimeter? PCM (Powertrain control module) also known as ignition control module (ICM) and engine control module (ECM). The PCM module is…
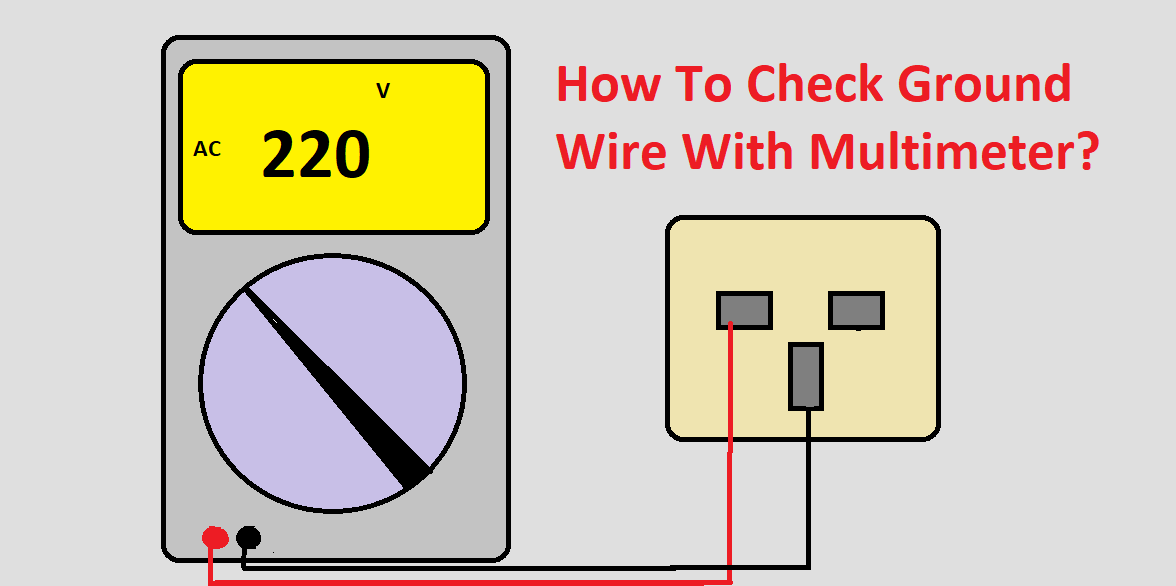
Multimeter How to Check Ground Wire with a Multimeter ? The ground wire is used to make the connection of the appliance to the earth. To eliminate the risk of…





![[SPICE] transient GMIN stepping at time=0.00156965](https://geekyengineers.com/wp-content/uploads/2022/03/How-do-you-fix-time-too-small-in-Proteus.png)