
Transmission Line Inspection Robot is also known as Power Line Inspection Robot is used on Transmission lines for monitoring and fault detection. Using this robot we can measure the current/voltage, Temperature, and Humidity. For physical monitoring of the conductor, we are using a camera that will give us real-time video footage of the current state of conductors, insulators, dampers, separators, or poles.
How does Transmission Line Inspection Robot work?
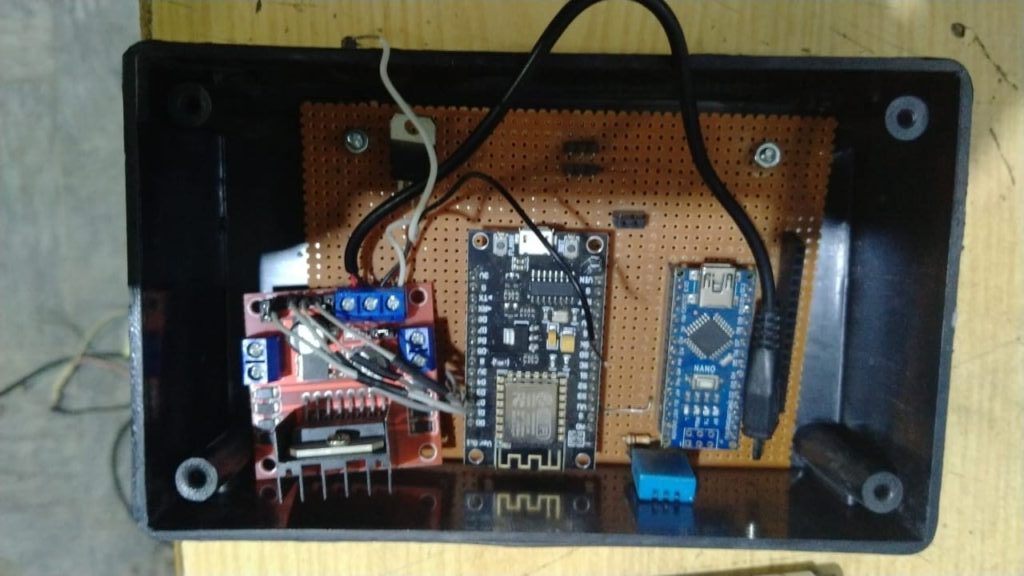
The control architecture of the robot for transmission lines includes an Arduino UNO Microcontroller, for monitoring purposes or either current/voltage, Temperature, Humidity. We are using Sensors, which can measure in real-time and give their feedback to the microcontroller (Arduino UNO Microcontroller), this feedback can be displayed on the App interface to inform the operating user.
For physical monitoring of the conductor, we are using the camera which will give us real-time video footage of the current state of conductors, insulators, dampers, separators, or poles. There is another app designed for that purpose so that video footage can easily be viewed on a bigger screen. Now the workers can monitor the condition of the conductor in a very convenient way without any danger.


Free Space Optical Wireless Audio Transmission System
Components used:
- Current Sensor
- DHT Sensor
- IP Wireless Camera
- L329D motor driven circuit
- DC geared Motors
- Arduino Uno
- Node MCU
- Wi module
- Humidity senor
- Temperature sensor
- IP wireless camera
Results
The design of the complete robot for transmission line inspection is carried out based on experimental and mechanical analysis. All subordinate systems of the robot mechanism are assembled, fixed, and integrated with the control system. An android-based control application is used to operate the robot. The Robot has the following dimensions Length is 30cm, Width is 22cm and height is 17cm. The robot base is 3.5 inches wide. The weight of the robot is about 5 kg with all the tools and within the volume of 4.62*10^3
Robot-based prototype experiments are conducted through a straight line of a transmission line setup. Robot motion through a straight line, tower junction crossing, and motion through jumper cable is easy for the robot. Several trial experiments are conducted. The average time taken for ten experiments is about 7.5 minutes. This PLIR takes an average time of 42.6 s to cover a 10 m distance on cables between two poles.

Prepaid and Theft Detection Energy Meter using GSM and Arduino
Conclusion
Transmission line Robot mechanism comprises of subsystems and each subsystem is designed as per the detailed design procedure and analyses were also made before integrating all the subsystems. The Android-based Arduino controller is used for experimentation. The prototype robot mechanical model is simple in design and easy to study. It is cheaper and small help for traversing through both straight power lines and jumper cables. This prototype robot has multiple sensors to sense the basic changes in the transmission line like temperature, current, humidity. The robotic operation also has in-house setup lessons.
The time taken for the robots to move is more than we expected due to the lack of a clear set of robots and tower setup. The proposed robot mechanism shall be appropriate for inspection and give us real-time information about the transmission lines. This technology has a huge demand in Power Distribution Companies because for the inspection of transmission lines many countries used a chopper to inspect the line and it is costly and dangerous. While using a robot they can save their expenses and most importantly human life, because anything can happen when they are working at a very high level from the ground.
I go to see daily a few blogs and websites to read articles, but this website offers feature based articles. Constancy Lucias Luz
thanks
HOW CAN I CONTACT YOU SIR
On instagram or facebook
Hello, you have a very nice website. I wanted to comment.